ICUAS’26 UAV Competition Simulation Stage Overview
The objective of the ICUAS 2026 UAV Competition is, for each competing team, to deploy a team of UAVs in an urban environment to locate and identify threats. The UAVs deploy from one base and need to find and identify several targets in a known environment, while tracking a ground vehicle. Since some of the threats may interfere with communication links between the agents (i.e., the UAVs), it is required to keep constant communication between the base and all UAV agents in the system, especially between the base station and the ground vehicle, with only the current position of the vehicle being known to the rest of the system.
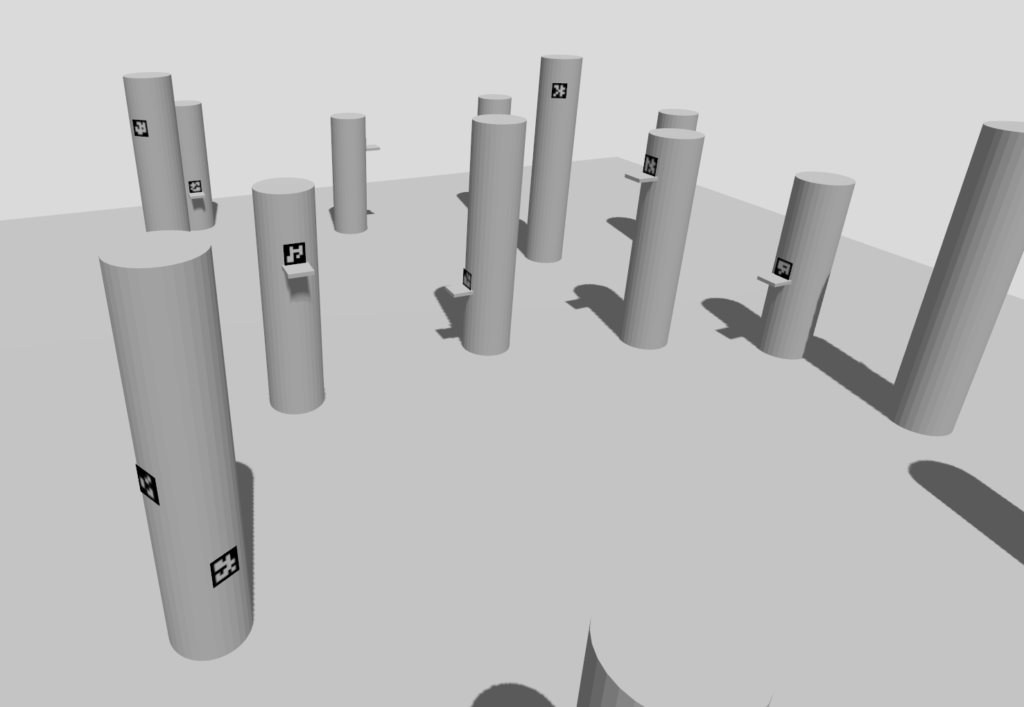
To extend the time of the mission, each UAV is / was allowed to return to the base once, for (re-) charging. Several perching spots (modelled as landing pads) were scattered around the environment. The UAVs needed to, first, find and identify these spots, after which they could be used to land the UAVs and preserve the battery of the agent. Throughout the world, an unknown number of target and decoy markers were scattered with the aim for the UAV teams to find and report the ones identified as threats, as shown in Figure 1.
The competing teams were provided with a sample world, and the performance of the team solution was evaluated in two unseen worlds through three scenarios involving different numbers of UAV agents with several values of max communication range. All world models were available to the competing teams at runtime as Octomaps; no other prior knowledge was disclosed, such as the number of target/decoy markers or the number of landing pads. The UAVs needed to find as many targets as possible within a 30-minute time limit, while maintaining the connection with the base and the ground robot for as long as possible.
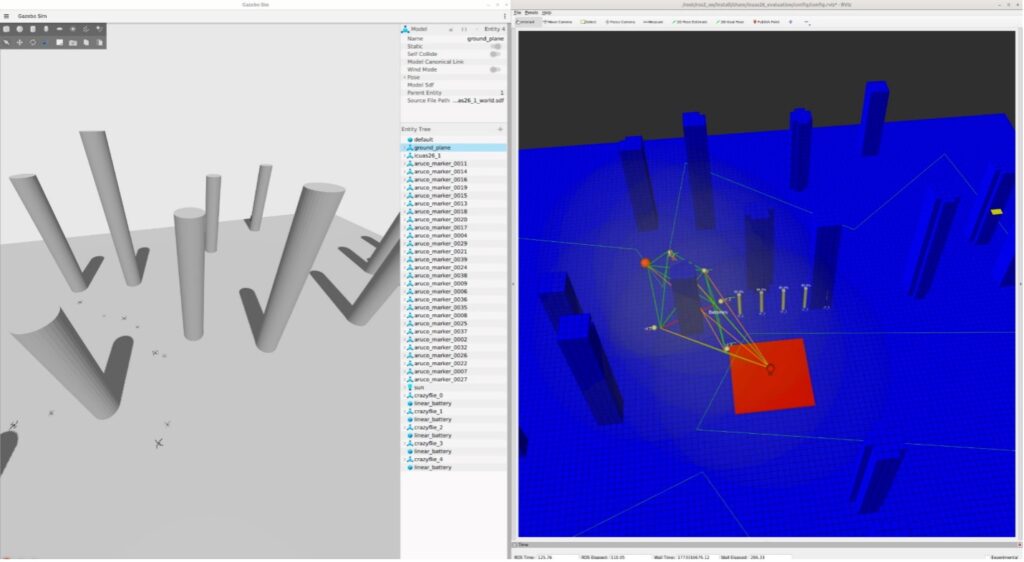
The UAV Competition organizing team developed a complete evaluation package, tracking the position of Crazyflies to check whether they are crashing into obstacles or leaving the bounds of the flying area, both of which were penalized behaviors. The developed software also tracks the battery state of each Crazyflie and reports if the battery goes below a defined threshold, which is also a penalized behavior. Finally, the evaluation software is constantly monitoring the state of the connectivity of the underlying communication graph by checking the link validity and calculating the Fiedler value of the graph, reporting each instance in which the graph becomes disconnected. Figure 2 shows a valid configuration of the Crazyflie team in the ICUAS’26 UAV Competition.
The results of each team run is a log file containing all the events. Logs were then used to score the run. Competing teams were awarded points for finding ArUco markers (40% of the total available points), maintaining connectivity (30% of the total available points), and extending the total mission time (30% of the total). Points were deducted for penalized behaviors (crashing, going out of bounds, low battery state) with each infraction resulting in 10%-point deduction. The final score for the team was the average of three runs across unseen worlds.
The List of Finalist Teams
Following a rigorous evaluation procedure, the following teams emerged as top contenders and qualified for the finals at the conference venue in Corfu, Greece.
1st place team: AGH Avader, AGH University of Krakow, Poland
Team leader: Kamil Jędrzejko
Team members: Remigiusz Mietła, Mateusz Gołąbek, Tymoteusz Domagała, Jan Jagodziński, Dominik Babiarczyk, Hubert Gąska, Krzysztof Jagiełło, Szymon Hołysz
2nd place team: QADT, Queen’s University, Canada
Team leader: Ethan Milburn
Team Members: Abdullah Mohsin, Ashton Antony, Benjamin Cox, Cole Jowett, Erin Payne, Ethan Milburn, Gavin Tan, Kuzey Bilgin, Liam Shannon, Nishith Chowdary Ravuri, Purujit Kantiya, Visakan Makilrajah
3rd place team: ARRF, Kyungpook National University, South Korea
Team leader: Taeseung WOO
Team members: Seongjin OH, Kangmin KIM, JinWan KIM, Jihyeong RYU, Soyeon PARK, Jiyoung YOO
4th place team: CVRLs, Foundation for Research and Technology – Hellas (FORTH), Greece
Team leader: Michail Vangos
Team members: Michail Vangos, Iliana Platona, Michalis Savorianakis, Christos Trifinopoulos
5th place team: αeRAS, National Technical University of Athens, Greece
Team leader: Michalis Psychis
Team members: Zoi Tsouroufli, Maria-Rozina Bertou, Konstantinos Sarakis, Petros Pantazis, Elena Alevropoulou
Congratulations to all finalist teams, and to teams that did not manage to qualify but have shown great results in the simulation stage: Aerial Robotics (Indian Institute of Technology Kanpur, India), UMIC-AeRoVe (Indian Institute of Technology Bombay, India), Drone Research Center (Brno University of Technology, Czechia), SECO (University of Mons, Belgium) and Draft (Politecnico di Torino, Italy). Thank you to all the other teams that showed interest in the ICUAS’26 UAV Competition! Detailed points breakdown is available in the competition repository: https://github.com/larics/icuas26_competition/discussions/57.
Acknowledgements
The work of LARICS (https://larics.fer.hr/) team on preparing and evaluating the ICUAS’26 UAV Competition simulation scenario was supported by the project ”Safe and Effective CBRNe Response with semiautonomous HEterogeneous RObotic System – CBRNe HERO” funded by the European Union – NextGeneration EU under Grant NPOO.C3.2.R3-I1.04.0075.