* * * The UAV Competition Guidelines are available for download in printer-friendly (PDF) format . * * * ![]()
UAV Competition Guidelines
The 2026 ICUAS UAV Competition is organized (as in previous years) by the Laboratory for Robotics and Intelligent Control Systems, LARICS, University of Zagreb, Faculty of Electrical Engineering and Computing, Croatia, through the CBRNe-HERO project.
The competition will take place in two stages. The first stage is the qualifiers stage. Registered teams will develop their solution in a ROS-Gazebo environment. Submitted solutions will be evaluated and the ‘top teams’, up to six, will continue to the second and final stage. In the final stage, during the Conference, teams will present and will demonstrate their solution. The UAV Competition timetable is shown below.
| October 1, 2025 | Initial draft of the rulebook published, team registration opens |
| December 19, 2025 | Initial submission – team registration closed |
| January 16, 2026 | Debug submission |
| January 23, 2026 | Simulation stage submission window opens |
| February 20, 2026 | Simulation stage submission deadline |
| March 6, 2026 | Results of simulation phase announced, finalists announced |
Teams are required to register via the Google form, online.
| IMPORTANT The Competition Rules along with scenario details are subject to change! Check the official repo and the rulebook for any updates: https://github.com/larics/icuas26_competition. Clarifications and FAQs will be publicly announced. Communication regarding clarifications on scenario description, rules and scoring will be via the Github discussions: https://github.com/larics/icuas26_competition/discussions. For the simulation phase, the scoring scheme, including time limits and penalties, will be announced after the first evaluation runs. The scenario and the scoring scheme for the finals will be announced by the end of the simulation phase. |
Eligibility criteria and team composition
The UAV Competition is open to any full-time BSc, MSc and PhD students and/or groups of similar proficiency levels. There is no fee to enter and participate in the qualifier phase of the UAV Competition.
For the first phase, the simulation phase, there is no limit on the number of team members. However, it is strongly recommended that for the second phase, for the finals, the number of team members is four (4). It is mandatory that all team members (up to four) be physically present at the Conference for the UAV Competition; these team members do not need to pay a registration fee for the UAV Competition. However, if team members are authors of accepted papers, or simply wish to also participate in the Technical Conference, then, they should register and pay the Student Registration fee.
Each team must elect a Team Leader (TL) who will be the point of contact for all correspondence with the organizing committee, and referees. Given the dynamic nature of the competition, which may evolve based on received feedback and comments, teams will be given time to ‘slightly adjust’ the number of team members to tackle all challenges.
Competition scenario
Multi-UAV System for Communication Network Establishment and Maintenance during CBRNe Incidents in Urban Environments
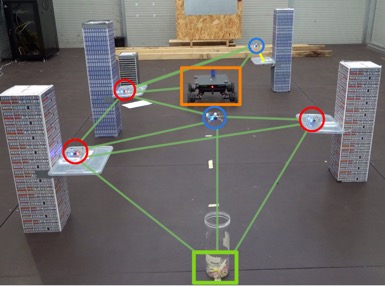
A team of UAVs is deployed in an urban environment to track a vehicle, which is tasked with resolving CBRNe threats (chemical, biological, radiological, nuclear, explosive). The UAV team deploys from a (the) base and needs to track a ground vehicle and to maintain its connection with the base station. The ground vehicle is controlled externally, and the UAV team (system)system knows only its current location. Since some threats may interfere with communication links between agents, the UAV team is required to keep constant communication between the base and all agents in the system. The connection between neighboring agents in the system is maintained by keeping line of sight (as shown in the Figure) and by limiting the distance between agents. The team is considered to be in a valid configuration if the underlying graph is connected.
Multi-robot team for search, identification and resolving CBRNe threats in urban environments. A team of Crazyflies is tasked with following a ground vehicle to maintain its connection to the base station, while also searching for threats or landing spots to use for energy conservation with the aim of extending the mission time.
The team of UAVs is also required to locate and identify an unknown number of CBRNe threats, which are simulated with ArUco markers, and to report the location of the threat to the base. While searching, the battery of each UAV is draining and each UAV can go back to the base to recharge, or land on available spots, which are also marked with ArUco markers. There are also decoy markers that do not denote nor CBRNe threat nor landing spot. When going back to the base, or landing, the system needs to remain connected even with one or more UAVs charging or grounded on landing spots. Each UAV can recharge only once but it is allowed to land multiple times on landing spots. The mission ends when the connection of the ground vehicle to the base is lost completely.
Evaluation
To evaluate the performance of the team of UAVs in such scenario, three benchmarks will be used:
- Benchmark 1: Threat localization and identification – The ability of the UAV to correctly identify all existing threats in the environment and report their location accurately.
- Benchmark 2: Connectivity – The ability of the team to remain connected throughout the mission.
- Benchmark 3: Time – The ability of the team to maximize the mission time of the ground vehicle
Code and data structures
The simulation phase environment is the Gazebo simulator (http://gazebosim.org/), in conjunction with Robot Operating System (ROS, https://www.ros.org/). Being realistic and modular, the combination of Gazebo and ROS enables simulations of both actuators and sensors through various plugins. For the UAV Competition, the supported versions for the simulation stage, and the versions that the solutions will be evaluated on, are Gazebo Garden and ROS 2 Humble, running on Linux Ubuntu 22.04 LTS. Teams may opt to use different versions, in which case they take the risk of their code not running on the evaluation machine.
The UAVs to be used are Bitcraze Crazyflies, running through SITL within CrazySim. General information about Crazyflies can be found here.
For the first phase of the UAV Competition, it is expected that a team’s solution will be in the form of one or more ROS nodes. The developed node(s) will interface with the rest of the system via topics and services. List of topics, services and data types will be disseminated to the teams via the technical documentation accompanying the installation files. Subject to feedback from the teams, the organizing committee is open to revise these interfaces to streamline the integration of code developed by the teams. Teams are allowed to use ROS messages and services based on built-in ROS message types to communicate between nodes. The solution is to be submitted through Docker containers. Exact details will be communicated through the competition repository.
 |